Appearance
Riptide v1 + v2 (Seattle Solvers – FTC 23511) | Saket - 23511
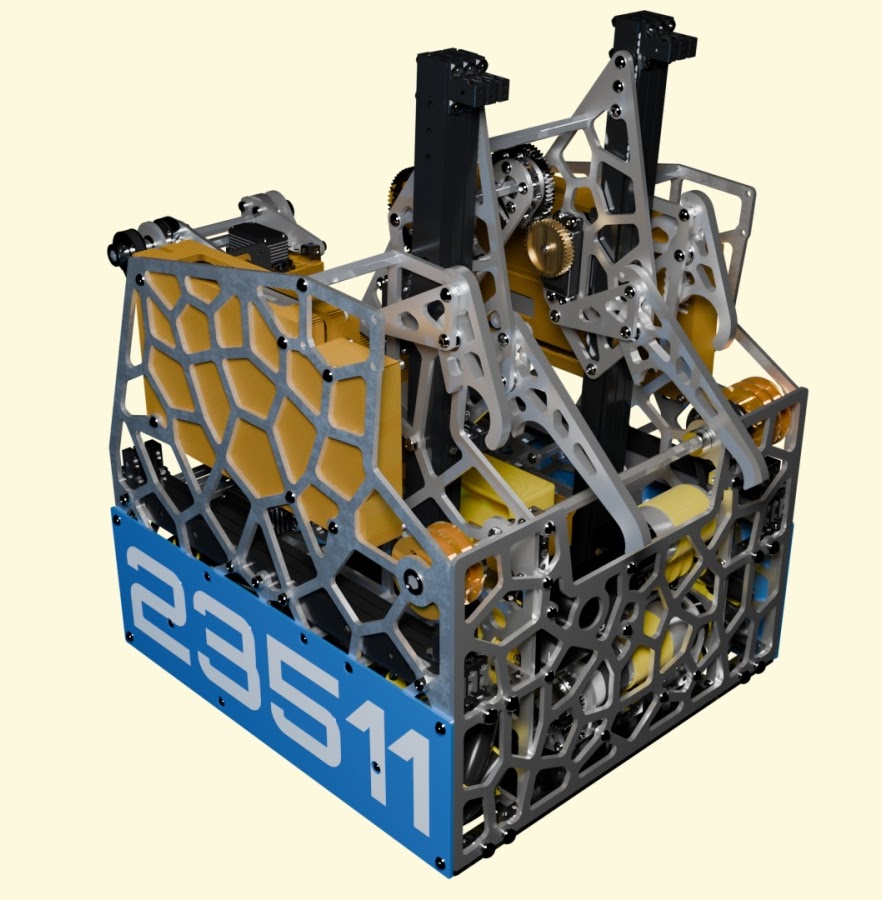
This is the CAD for the two main versions of Riptide, built by FTC Team 23511 Seattle Solvers during the 2024–2025 Into the Deep season. The full version history is viewable in the Onshape document linked below.
This robot demonstrates how to tightly package mechanisms within a very small footprint, while keeping power transmission and design simple and reliable.
Drivetrain
Riptide features a compact 12.25 in. × ~11.5 in. parallel plate mecanum chassis. The drivetrain is powered by 435 RPM motors with 1:1 belt and pulley transmission.
Version 1 used the Optical Tracking Odometry Sensor (OTOS) for localization, but was later upgraded in v2 to a dual GoBilda 2-wheel swingarm odometry system paired with a Pinpoint encoder for increased accuracy and reliability.
Deposit + Hang
The deposit system includes three stages of 16" BWTLink linear slides on both sides of the robot for added structural rigidity. It uses an arm and wrist system (revamped in v2) for scoring and transferring in nearly any robot orientation.
In v2, the slide speed was increased, and a concept for a multi-speed gearbox with a built-in clutch was prototyped, though not competition-ready. A Level 2 hang was still possible via a high gear ratio powered by two Axon MAX+ servos on a pivoted arm system.
Intake
The intake uses three stages of 12" BWTLink slides on each side of the robot. Initially designed with a virtual 4-bar linkage and claw, it was later replaced with an active intake powered by a bare motor.
One-way flaps and a REV color sensor allowed for fast and accurate sample acquisition from the submersible.
Advantages
- Extremely compact form factor (12.25 in. × ~11.5 in.)
- Mechanically simple across all systems
- Efficient and modular design process in Onshape (with a well-structured master sketch)
Download & Access
The Onshape CAD for Riptide:
View/Download CAD (All Versions)
⚠️ Note: Version history is enabled, so you can explore the differences between v1 and v2 inside the document.
Photos
Version 1 Photo:
Version 2 Photo:
